Dark Mode

Simaihub Expert Navigation Foundation Pack
Agent Simulation Data
Tags and Keywords
"No reviews yet"
£1,999
About
Simaihub Expert Navigation Foundation Pack(V1)
Product: Reinforcement-learning-ready expert navigation data
One-line value: Production-grade mobile-robot trajectories from ROS 2 + Gazebo + Nav2 + AMCL—ready for behavior cloning, offline RL, and as the base layer for harder robustness training.
At a glance
Simulation worlds: Hospital · Bookstore · Small warehouse · Large warehouse
Training tuple: Every row is a full
**Sensing / control:**360° LiDAR state, IMU, odometry, differential-drive commands, shaped reward breakdown
Training tuple: Every row is a full
(s, a, r, s', done) step with aligned next_state_***Sensing / control:**360° LiDAR state, IMU, odometry, differential-drive commands, shaped reward breakdown
This is Release v1 of Simaihub’s RL-oriented expert dataset: a clean, multi-scene success corpus you can ship into pipelines today, plus early failure, recovery, and failure→recovery (joint) CSV slices that preview the robustness track we are scaling next.
Why teams choose this pack
- Train-ready: No hand-rolled alignment—
next_state_*is already co-timed with actions and rewards. - Algorithm-friendly: Dense decomposition (
reward_goal,reward_progress,reward_collision,reward_stuck, …) supports CQL, IQL, TD3+BC, BC, and custom offline pipelines. - Scene breadth: Four distinct layouts reduce overfitting to a single floorplan and support pretraining before domain-specific fine-tuning.
- Credible stack: Collected under ROS 2 Humble and Gazebo with standard Nav2 / AMCL—the same toolchain many AMR programs already use.
Core expert corpus — successful navigation
All catalogued expert episodes in this release terminate with
goal_reached.data/hospital/:110,061 steps
data/bookstore/:153,779 steps
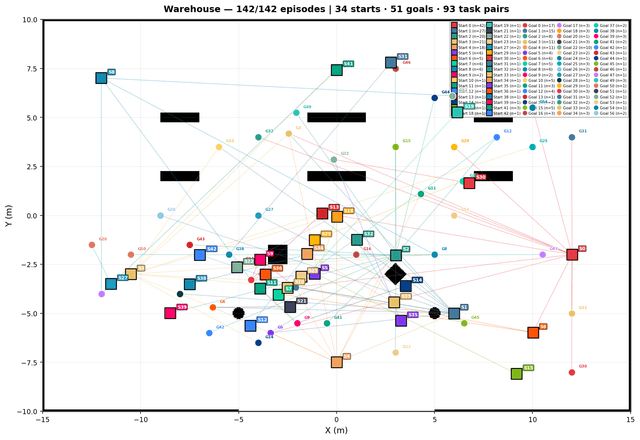
data/small_warehouse/:98,408 steps
data/warehouse/:130,622 stepsSupplementary rollout slices (robustness preview)
Structured exports already exist under
data/<scene>/failure|recovery|joint/ as *_final.csv files .Bookstore: Failure(17,738steps)、Recovery(12,282steps)、Joint(21,406steps)
Hospital: Failure(52,923steps)、Recovery(28,644steps)、Joint(42,530steps)
Small warehouse: Failure(34,762steps)、Recovery(32,935steps)、Joint(51,380steps)
Warehouse: Failure(117,770steps)、Recovery(109,053steps)、Joint(74,091steps)
Small warehouse: Failure(34,762steps)、Recovery(32,935steps)、Joint(51,380steps)
Warehouse: Failure(117,770steps)、Recovery(109,053steps)、Joint(74,091steps)
Roadmap — how we expand generalization
Release v1 prioritizes nominal expert success. To strengthen policy robustness and out-of-distribution generalization, Simaihub will systematically add:
- Dynamic obstacle simulation data — pedestrians, industrial movers, temporary clutter, and congestion-style interactions so policies see LiDAR and reward signals that static worlds alone cannot provide.
- Richer failure corpora — timeouts, collisions, stuck / oscillation, planner dead-ends—labeled with clear terminal reasons for offline RL and safety-aware training.
- Failure + recovery sequences — expanded failure→recovery and joint episodes so agents learn not only “what goes wrong” but how expert controllers recover and complete tasks.
Together, these extensions turn the foundation pack into a multi-stage curriculum: expert success today → failure / recovery / dynamic clutter tomorrow → full warehouse-grade benchmark narratives over time.
Official benchmark splits, leaderboard protocols, and warehouse-only SKUs remain product options we can align with enterprise procurement—contact us for packaging that matches your evaluation workflow.
Technical snapshot
Each timestep is one CSV row with a complete transition.
Observation highlights: pose (
state_x, state_y, state_yaw), goal in polar form (state_goal_dist, state_goal_bearing), velocities, IMU (6), 360-dim state_scan, optional scan statistics, plus next_state_* mirrors.Actions:
action_v ∈ [-0.2, 0.4] m/s · action_w ∈ [-2.0, 2.0] rad/sRewards: total
reward plus reward_goal, reward_collision, reward_progress, reward_time, reward_smooth, reward_clearance, reward_heading, reward_stuck.Episode fields:
episode_id, step, timestamps, done, done_reason.Approximate 373-dim base state (excluding optional compact scan summaries)—ideal for LiDAR-centric navigation policies.
Ideal buyers & use cases
Robotics product teams: Bootstrap offline RL or imitation policies before on-robot trials
Research labs: Reward shaping, representation learning, sim-to-real transfer studies
Embodied AI groups: Large structured corpus for pretraining before scarce failure data arrives
Research labs: Reward shaping, representation learning, sim-to-real transfer studies
Embodied AI groups: Large structured corpus for pretraining before scarce failure data arrives
License Agreement
IMPORTANT — READ CAREFULLY before downloading, accessing, or using this Dataset. By downloading, accessing, or using the Dataset in any way, you ("Licensee") agree to be legally bound by all terms of this Agreement. If you do not agree, do not download or use the Dataset.
This End-User License Agreement ("Agreement") is a legally binding contract between Licensee and Simaihub ("Licensor"), the sole creator and owner of the Simaihub Expert Navigation Dataset ("Dataset").
1. Ownership & Intellectual Property
1.1 The Dataset — including all trajectory records, reward signals, sensor readings, metadata, schemas, tooling scripts, and accompanying documentation — is the exclusive intellectual property of Simaihub. All rights, title, and interest in and to the Dataset are and shall remain with Licensor.
1.2 Purchase or download of the Dataset constitutes a license to use it under the terms herein and does NOT constitute a transfer of ownership, copyright, or any other proprietary right to Licensee.
1.3 The Dataset may incorporate digital watermarks or unique identifiers embedded on a per-license basis. Licensee must not attempt to detect, remove, alter, or circumvent any such watermarks or identifiers.
1.4 Reservation of Rights — Except for the limited rights expressly granted in Section 2, all rights, title, and interest in the Dataset remain exclusively with Licensor. No implied licenses are granted. Any use not expressly permitted is prohibited.
2. Grant of License
Subject to full compliance with this Agreement, Licensor grants Licensee a limited, worldwide, non-exclusive, non-transferable, non-sublicensable, revocable license to:
2.1 Access and use the Dataset files (CSV, JSON, PNG, and associated documentation) solely for:
- (a) Academic Research — including publishing papers, theses, and participating in non-commercial academic competitions; or
- (b) Internal Commercial Research — using the Dataset within Licensee's own organization for research or product development, subject to the restrictions in Section 3.
2.2 Reproduce and internally modify the Dataset solely to train, evaluate, or fine-tune machine learning or robotics models for Licensee's own research or internal product development.
2.3 Publish research results that reference or are derived from this Dataset, provided attribution requirements in Section 4 are satisfied.
2.4 Trained models (clarification) — Subject to Section 3, Licensee may train machine-learning or robotics models on the Dataset and deploy the resulting models inside Licensee’s own products or services (including robots, AMRs, edge devices, or customer-facing software) provided that: (i) Licensee does not redistribute the Dataset or any substantial extract or reconstruction of it to customers or third parties; (ii) Licensee does not market or distribute the trained model primarily as a substitute Dataset or as a downloadable dataset generator competing with Licensor’s products; and (iii) standalone resale of the trained model as a general-purpose navigation dataset or “pre-trained navigation package” intended for third parties to train further without a separate written Commercial License remains governed by Section 3.3.
No rights are granted beyond those expressly stated herein.
3. Restrictions
The following acts are strictly prohibited without prior written permission from Licensor:
3.1 REDISTRIBUTION — Licensee must NOT redistribute, share, resell, sublicense, lend, rent, or otherwise transfer the Dataset or any portion thereof to any third party, WHETHER FOR FREE OR FOR A FEE, by any means including but not limited to:
- Posting to public or private data-sharing platforms (e.g., Hugging Face, Kaggle, Roboflow, IEEE DataPort, Zenodo, AWS Data Exchange, or similar);
- Placing files in publicly accessible cloud storage (e.g., AWS S3 public buckets, Google Drive public links, Dropbox shared links);
- Publishing to public or private version-control repositories (e.g., GitHub, GitLab, Bitbucket);
- Distribution via peer-to-peer networks, torrents, or file-sharing services;
- Bundling or packaging with other products, datasets, or services for onward distribution.
3.2 DERIVATIVE DATASETS — Licensee must NOT create, publish, or distribute any dataset that is derived from, substantially based on, or incorporates any portion of this Dataset for any purpose other than Licensee's own internal use, unless a separate written agreement with Licensor expressly permits such use.
3.3 COMMERCIAL MODEL PRODUCTS — Without a separate Commercial License Agreement, Licensee must NOT publish, sell, license, or distribute a trained model as a standalone commercial dataset substitute, navigation-skill marketplace SKU, or “downloadable foundation model” whose primary value to third parties is to replace or replicate access to this Dataset. Ordinary deployment of models trained on the Dataset inside Licensee’s own robotic or software offerings is addressed in Section 2.4 and is permitted if all other terms (especially redistribution prohibitions) are met.
3.4 COMPETITIVE USE — Licensee must NOT use the Dataset, in whole or in part, to build or improve any product or service that directly competes with Licensor's current or future offerings without prior written consent from Licensor.
3.5 MODEL DISTILLATION — Licensee must NOT use outputs, labels, or features derived from models trained on this Dataset to generate or label any new dataset intended for public release or onward commercialization.
3.6 INTEGRITY — Licensee must NOT remove, alter, obscure, or falsify any copyright notice, license terms, attribution metadata, watermark, or digital identifier included in or accompanying the Dataset.
3.7 UNLAWFUL USE — Licensee must NOT use the Dataset for any purpose that violates applicable laws or regulations, including but not limited to export control laws, data-protection regulations, or intellectual property laws.
3.8 NO REVERSE ENGINEERING OF PROTECTION MEASURES — Licensee must NOT reverse engineer, decompile, or attempt to extract Licensor’s protection schemes (including watermarking, identifiers, or license enforcement mechanisms) except to the minimum extent mandatory under applicable law.
4. Attribution
When publishing any work that uses or references this Dataset, Licensee must include the following citation in a prominent location (e.g., paper acknowledgements, project README, or documentation):
Simaihub Expert Navigation Dataset (2026). Collected using ROS 2 Humble + Gazebo, TurtleBot3 Waffle, Nav2 + AMCL across multiple AWS RoboMaker simulation environments (Warehouse, Bookstore, Hospital). https://www.simaihub.com
5. Third-Party Components
The simulation environments used to collect this Dataset are based on the following open-source projects:
AWS RoboMaker Small Warehouse World :Apache License 2.0
AWS RoboMaker Bookstore World:Apache License 2.0
AWS RoboMaker Hospital World:Apache License 2.0
TurtleBot3:Apache License 2.0
ROS 2: Apache License 2.0
IMPORTANT: The above open-source licenses apply only to the respective components in those upstream repositories. The trajectory data (CSV/JSON files), reward signals, tooling scripts, and all documentation created by Simaihub are NOT covered by those open-source licenses and remain exclusively subject to this Agreement.
6. Audit Rights
Licensor reserves the right, upon reasonable written notice (no less than 10 business days), to audit Licensee's systems and records solely to verify compliance with this Agreement, at most once per calendar year and at Licensor's expense unless a material breach is found. Licensee agrees to cooperate reasonably with such audit.
7. Term and Termination
7.1 This Agreement commences on the date Licensee first downloads or accesses the Dataset and remains in effect until terminated.
7.2 Licensor may terminate this Agreement immediately and without notice if Licensee breaches any provision of Sections 3 or 6. For other material breaches, Licensor shall provide Licensee with written notice; if the breach is not cured within 15 calendar days, this Agreement terminates automatically.
7.3 Upon termination, Licensee must immediately cease all use of the Dataset and permanently delete or destroy all copies in its possession or control (including backups), except for research results already published in peer-reviewed venues prior to termination.
7.4 Sections 1 (Ownership), 3 (Restrictions), 4 (Attribution), 5 (Third-Party Components), 6 (Audit Rights), 8 (Disclaimer), 9 (Limitation of Liability), 10 (Governing Law), 11 (General Provisions, including remedies in 11.6), and 12 (Contact) survive termination of this Agreement.
8. Disclaimer of Warranties
THE DATASET IS PROVIDED "AS IS" WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE IMPLIED WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE, ACCURACY, AND NON-INFRINGEMENT. LICENSOR DOES NOT WARRANT THAT THE DATASET IS ERROR-FREE, COMPLETE, OR SUITABLE FOR ANY PARTICULAR USE CASE.
9. Limitation of Liability
TO THE MAXIMUM EXTENT PERMITTED BY APPLICABLE LAW, IN NO EVENT SHALL LICENSOR BE LIABLE FOR ANY INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING LOSS OF PROFITS, LOSS OF DATA, BUSINESS INTERRUPTION, OR COST OF SUBSTITUTE GOODS OR SERVICES) ARISING OUT OF OR IN CONNECTION WITH THIS AGREEMENT OR THE USE OF THE DATASET, EVEN IF LICENSOR HAS BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES. LICENSOR'S TOTAL CUMULATIVE LIABILITY TO LICENSEE UNDER THIS AGREEMENT SHALL NOT EXCEED THE AMOUNT PAID BY LICENSEE FOR THE DATASET IN THE TWELVE (12) MONTHS PRECEDING THE CLAIM.
10. Governing Law and Dispute Resolution
This Agreement shall be governed by and construed in accordance with the laws of the People's Republic of China, without regard to its conflict-of-law principles. Any dispute arising out of or relating to this Agreement shall first be resolved through good-faith negotiation. If not resolved within 30 days, either party may submit the dispute to the people's courts having jurisdiction at Licensor’s principal place of business in mainland China. If Licensee is a qualified offshore purchaser and both parties have executed a written addendum, an alternative forum may apply solely as stated in that addendum.
11. General Provisions
11.1 Entire Agreement — This Agreement constitutes the entire agreement between the parties with respect to the Dataset and supersedes all prior or contemporaneous agreements, representations, or understandings relating thereto.
11.2 Severability — If any provision of this Agreement is held to be invalid or unenforceable, the remaining provisions shall continue in full force and effect.
11.3 No Waiver — Failure by Licensor to enforce any provision of this Agreement shall not constitute a waiver of future enforcement of that or any other provision.
11.4 Assignment — Licensee may not assign or transfer any rights or obligations under this Agreement without prior written consent of Licensor. Any purported assignment in violation of this section is null and void. Licensor may assign this Agreement without restriction.
11.5 Amendments — Licensor reserves the right to update this Agreement for future versions of the Dataset. Continued use of a new version of the Dataset constitutes acceptance of the updated Agreement.
11.6 Remedies — Licensee acknowledges that unauthorized redistribution or derivative publication of the Dataset (Sections 3.1–3.2) may cause irreparable harm to Licensor for which monetary damages are inadequate. Licensor is entitled to seek injunctive and equitable relief in addition to any other remedies available at law or in equity. If Licensor prevails in enforcing material breaches of Sections 3.1, 3.2, or 3.6, Licensor may recover reasonable attorneys’ fees and costs, to the maximum extent permitted by applicable law.
12. Contact
For commercial licensing, bulk distribution rights, OEM agreements, or any other inquiries, please contact:
Simaihub Email: support@simaihub.com
By downloading, accessing, or using this Dataset in any way, Licensee acknowledges that it has read, understood, and agrees to be legally bound by all terms and conditions of this Agreement.
Listing Stats
VIEWS
28
DELIVERY
INSTANT DOWNLOAD
LISTED
11/05/2026
UPDATED
13/05/2026
REGION
GLOBAL
![]() QUALITY
QUALITY
5 / 5
Loading...
£1,999
Download Dataset in CSV Format
Recommended Datasets
Loading recommendations...